
Automated Operations
The Swift spacecraft must be able to operate autonomously in order to react rapidly to new targets. When the spacecraft settles on a new target the XRT begins operation in Imaging Mode to determine the location (to better than 2.5arcsec within 5sec) of the GRB. In the other modes, Photodiode, Window Timing and Photon Counting the XRT will measure the lightcurve and spectrum while the burst afterglow flux is decreasing by many orders of magnitude. The XRT is designed to switch between different readout modes according to the instantaneous count rate in a completely autonomous operation.
While the spacecraft is slewing to a new target the bias row and the bias map are calculated from a WT and 5 PC frames. A raw frame for diagnostic porpuses is taken if the raw image flag is set. During the remainer of the slew the spacecraft is in LrPD mode until it settles on the target, and a 0.1s Image mode frame is taken and a centroid determined. If the fulx is too low for an accuate centroid a 2.5s frame is processed. After completing Imaging mode the instrument switches between PuPd, LrPd, WT and PC mode depending on the source count rate. A flowchart of the automated operations is shown below.
Readout Modes
The Swift XRT has the following readout/processing modes:
-
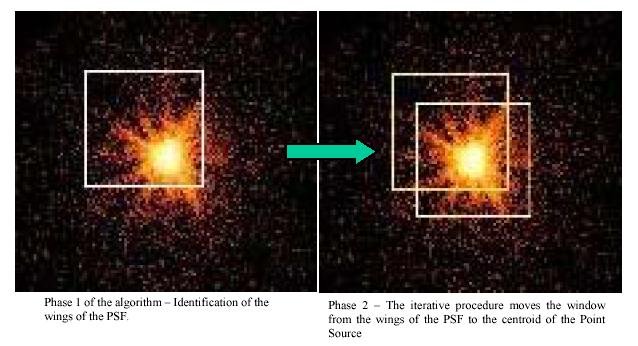
Imaging mode: This is a normal imaging exposure and readout, similar to Photon-counting mode (see below), except that we allow photons to pile up and make no attempt to do photon event recognition in the on-board processing. The CCD is operated like an optical CCD. The exposure time is variable and can be set by ground command; currently, exposure times of 0.1 and 2.5 seconds are implemented. For a bright GRB the image will be piled up but it will produce accurate position and a good flux estimate. A rapid and accurate centroid algorithm is used in order to meet the timing and accuracy requirements. The algorithm is divided in two phases, the first one locates the wings of the PSF, finding the window with the maximum density of isolated pixel events. The second phase is an iterative procedure that uses a "center of gravity" formula on the charge in the window derived from phase 1. The window is then moved to the newly computed centroid until the center of the window coincides with the actual centroid of the GRB. In Imaging Mode the following data are produced: the GRB centroid position, the X-ray flux extimate, a postage-stamp image telemetred via TDRSS and a compressed image in the science telemetry stream.
-
Photodiode mode: This is a fast timing mode to produce accurate timing information for very bright sources. This mode alternately clocks the parallel and serial clocks by one pixel each. Charge is accumulated in the serial register during each parallel transfer, with the result that each digitalized pixel contains charge integrated form the entire field of view. Photodiode mode produces a high speed light curve with time resolution of 0.14ms. This mode is useful for fluxes below 60Crabs. For sources fainter than 1Crab the arrival time and energy of each photon measured, producing both a spectrum and a lightcurve in counts per second. For sources higher than 3Crab the pile-up becomes significant and the spectroscopic resolution is compormised. At high fluxes all pixels in a pseudo image (631x602 pixels) are telemetered to the ground (Piledup Photodiode, PuPD). Al lower fluxes only pixels above the low level discriminator and below the upper level discriminator are telemetred to the ground (Low rate Photodiode, LrPd). Photodiode modes have been disabled following a micrometeoriod hit on May 27, 2005 that produced a very high background rate in this mode.
-
Windowed Timing mode: WT mode is a high gain mode to achive high resolution timing (2.2ms) with 1-D position information and spectroscopy. This mode is restricted to a 200 column window covering the central 8 arcminutes of the FOV. Window timing mode is useful for fluxes below 50Crabs and has no pileup for fluxes below 600 mCrabs.
-
Photon-counting mode: PC mode is the more traditional frame transfer operation of an X-ray CCD. It retains full imaging and spectroscopic resolution, but the time resolution is only 2.5 seconds. The instrument is operated in this mode only at very low fluxes (useful below 1 mCrab).
Although the Image Mode centroiding algorithm is designed to ignore cosmic rays, if the source is faint the algorithm can sometimes centroid on a cosmic ray position rather than a real celestial source. Cosmic rays dump a lot of charge in the CCD in a very compact region. The TDRSS position message flags cases that have large signals and therefore may be contaminated by cosmic rays, but this signature can also be produced by very bright afterglows. The XRT Postage Stamp image can be examined to determine whether such a case is likely to be a celestial source or a cosmic ray. For details, see the XRT Postage Stamp Image Photo Gallery .
XRT Software
Flight Software
There are two main pieces of flight software:
-
The Instrument Control Processor (ICP) software is responsible for instrument control, data collection and processing and spacecraft interfacing. On boot-up, the code performs self-tests and enters Manual State and Null mode (no digitalization of the data). Manual state is used for engineering test, calibration and instrument configuration. Once commanded in Auto State the software automatically collects and process data as described above.
- The Clock Sequencer code is generated by an IDL program that uses a graphical user interface to produce 21020 DSP assembler code. It supports a number of readout modes, including standar readouts in different CCD modes, and diagnostic modes that facilitate checkout of the camera during ground tests and on orbit.
Ground Processing and Data Analysis Software
The Swift Data Center (SDC) at NASA/GSFC is responsible for the Level 0 software, which produces time-ordered telemetry data and for the Level 1 software, which produces standard format FITS event files.
The Level 2/3 software is called the XRT Data Analysis Software (XRTDAS), a set of FTOOLS specifically developed for the XRT instrument by the ASI Science Data Center (ASDC, Frascati, Italy) in collaboration with HEASARC at NASA/GSFC and will support both pipeline and interactive data analysis. XRTDAS generates high level scientific data products, including cleaned and calibrated event files, images, spectra and lightcurves. XRTDAS files are in FITS format and fully comply with the NASA/GSFC Office of Guest Investigator Programs FITS standard conventions. XRTDAS is written in C, Fortran and Perl languages, it uses the HEASARC calibration database (CALDB) mechanism and runs on Unix platforms. XRTDAS is part of the HEAsoft Swift package for the analysis of all Swift data.
XRTDAS is available from the HEASARC at NASA/GSFC.
Swift Operations
With the exception of occasional manual calibration observations, the operation of the XRT is autonomous and driven by the on-board observation timeline and to newly discovered GRBs. The Swift Mission Operation Center (MOC) will load pre-planned target (PPT) timelines onto the observatory on a daily base. New GRBs trigger Automated Targets (AT) which are generated on-board by the BAT instrument. The Figure of Merit process controls the observing timeline and arbitrates between the PPTs and the ATs according to their assigned observing priorities.
The Swift observatory is in low Earth orbit and the XRT and UVOT cannot be pointed closer than 30 degrees to the Earth's limb. Because of this there is no "Continuous Viewing Zone" and the observations of any given target will be broken into segments of 20-30 minutes, called "snapshots".
The figure below provides an illustration of a typical "day in the life" of the XRT. It shows schematically how a newly discovered GRB (an AT) interrupts a previously scheduled series of observations (PPTs).
Swift Mission Operations Center
The Pennsylvania State University301 Science Park Road,
Building 2 Suite 332,
State College, PA 16801
USA
☎ +1 (814) 865-6834
📧 swiftods@swift.psu.edu
Swift MOC Team Leads
Mission Director: John NousekScience Operations: Caryl Gronwall
Flight Operations: Mark Hilliard
UVOT: Michael Siegel
XRT: Jimmy Delaunay
Swift Partners
UK: UCL MSSL Univ. of LeicesterUSA: NASA/GSFC LANL Omitron SwRI
Italy: SSDC/ASI INAF OA-Brera